Recent Funded Projects

AI4HyDrop: Holistic Approach for Urban Unmanned Traffic Management
AI4HyDrop aims to build a holistic framework incorporating various AI-based tools and associated information flows to address the complexity, safety, and scalability required for implementing U-space services for flying drones in urban and restricted environments. ITU ARC-AIGNC research group in the project supports building AI-driven autonomous flight plan approval procedures considering the needs of trajectory-based operations, environmental impact, and fairness/priorities of the airspace.
Next Generation Auto Ground Collision Avoidance System
AIGNC Advanced Technologies research group work on the future technologies of Next Generation Turkish Fighter Jet Aircraft. For this specific project, the research team develops a next-generation auto ground collision avoidance system using the full flight envelope of the aircraft. The project aims to go beyond the existing ground collision system methodologies.

Control of LEO Satellite Constellation
AIGNC group supports Baykar’s space mission program, namely Fergani, aiming to develop novel control designs for a spacecraft providing orbital payload injection and LEO satellite constellations. In addition to the control unit, the AIGNC group supports building indigenous satellite subsystems such as star tracker, reaction wheels, magnetorquers, etc.

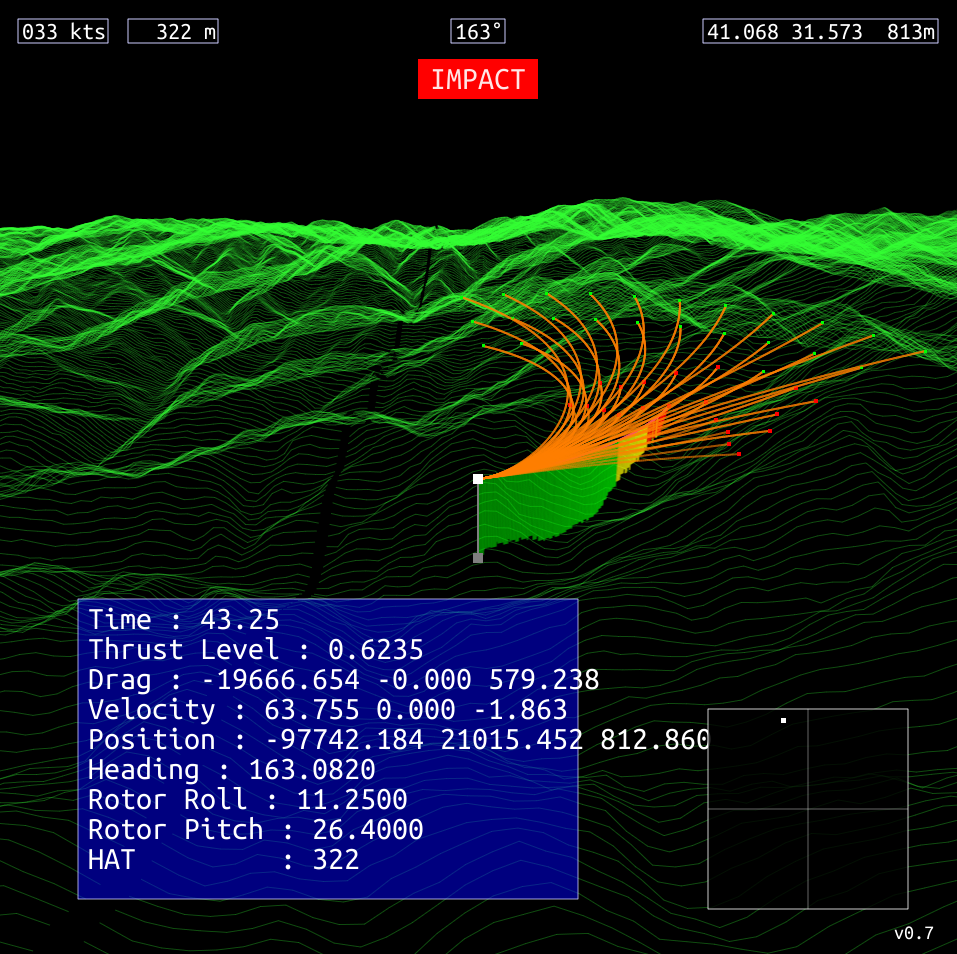
Collaborative Guidance for Swarm Missiles
Roketsan and ITU ARC cooperate on building collaborative guidance methodologies enabling coordinated attacks of swarm missiles. Specifically, the project aims to develop novel guidance and control methodologies for impact time and angle synchronization to provide multi-missile coordination.
Past Projects
START: Ensuring Resilient ATM Flow Network
AIGNC team, in this project, aims applying information spreading process to model the uncertainty propagation over air transportation network. The physical parameters of the network extracted from historical data are transformed into a parameter set of the epidemic model to simulate the propagation of delay. Then, we control the infection rates ensuring the stability of the meta-population network, which means to manage the traffic flow between the airports, where the problem is transformed into an optimization and reinforcement learning problem.


Abakus: AI-based Radar Anomaly Monitoring
Aselsan and AIGNC research group collaborate in developing a real-time radar anomaly detection system. Specifically, we build AI-driven algorithms detecting radar measurement problems, instantaneous disruptions, potential cyber-attacks, and spatial error hot spots. We create various layers for continuous radar monitoring in addition to a trajectory propagator that persistently checks the dynamic feasibility of the flight tracks.
Tube-launced Agile Drone
ITU ARC supports Aselsan in building a tube-launched foldable drone and multi-drone tube-launching system to enable instantaneous surveillance tasks. In addition to sneak deployments, the system provides launches from moving ground vehicles.
Visual Guided Predator Drone
Aselsan and ITU ARC builds a drone with fully visual navigation and guidance capabilities. We integrate AI-based visual target tracking and visual-inertial navigation into an autonomous agile drone to defend critical facilities such as airports where electronic warfare support, e.g. electroninc jamming, GPS-spoofing, etc., is not possible. The developed drones enable end-to-end autonomous operations with intelligent decisions without building any link with GPS and ground systems.
FACT: New CNS technolgy for UAS
The project FACT brought a much-needed update to CNS technology and built the bridge between future U-space services (expecting fully digital and highly automated) and conventional ATM systems, considering both technological and user perspectives. The project addressed and brought benefits for both existing and new airspace users, such as drones or urban air mobility.
COPTRA: Combining Probable Trajectories
COPTRA provided a) defining the concept of probabilistic trajectory prediction; b) defining the probabilistic traffic concept and studying how it can be constructed by combining probabilistic trajectories, using the probabilistic trajectory definition; and c) applying probabilistic traffic to Air Traffic Control (ATC) planning.
Airspace Wind Error Mapping
In the project, we developed advanced algorithms to reduce uncertainty in weather forecasts in trajectory prediction. The primary data set was the aircraft trajectories from the radar measurements that encapsulate information about the uncertain parameters, such as wind vectors, to build a probabilistic “wind map” to capture the wind estimation error.
HETS: Helicopter Terrain Avoidance Support System
HETS is a safe flight navigation algorithm for helicopter TAWS avionics, which supports pilots with visual guidance for low visibility and close-to-terrain operations. Specifically, the algorithm uses the performance models, monitors the potential terrain collisions, and issues alerts with visual guidance to the pilot. The algorithm has been developed for deployment in UH-60 Black Hawk helicopters.
AI-based Real-Time Airspace Threat Detection: AI-Radar
In this project, we built AI-based real-time airspace monitoring and anomaly/threat detection models in order to provide safe air flight traffic. The model involves two layers, enabling to detect flight trajectory anomalies through processing individual flights and historical trajectory patterns. The individual flight trajectories are tracked through online flight performance clustering, allowing us to classify the aircraft types in the airspace. Historical flight trajectory bundles provides nominal flight patterns to detect the unexpected deviations.

AI-driven Airline Predictive Maintenance
AIGNC group develops novel methodologies for predictive maintenance based on big data analytics and AI with the collaboration of Turkish Airlines and Turkish Technic. The aim is first to predict when a component failure might occur and second to prevent the occurrence of the failure by performing maintenance. Monitoring for future failure allows maintenance to be planned before the failure occurs, thus reducing unscheduled removals and avoiding Aircraft-on-Ground (AOG).
AUTOFLY-AID: Smart 4D Trajectory Management
AUTOFLY-Aid aimed to develop and demonstrate novel automation support algorithms and tools to the flight crew for flight critical collision avoidance using “dynamic 4D trajectory management”. The automation support system is envisioned to improve the primary shortcomings of TCAS, and to aid the pilot through add-on avionics/head-up displays and reality augmentation devices in dynamically evolving collision avoidance scenarios.
SRUS: Agile and SWARM Drones
ITU ARC developed agile swarm drones enabling broad UAV operations for HAVELSAN. ITU ARC fully designed and built small-size drones with agile flight envelopes. In real world test scenarios of the project, unmanned fixed wing platforms carry these small-sized drones and provide air drop for extended range operations. ITU ARC team provides controller, flight management, and navigation modules with their algorithms and avionics for these small size drones.
Locations
İTÜ Aerospace Research Center
İTÜ Ayazaga Kampüsü, Bilim ve Teknoloji Parkı, Havacılık ve Uzay Teknolojileri Uygulama ve Araştırma Merkezi, Maslak, 34469, Istanbul
+90 212 285 7554
arc_info@itu.edu.tr
show on a mapİTÜ Aero-Astro Faculty
İTÜ Ayazaga Kampüsü, Uçak ve Uzay Bilimleri Fakültesi, 3. Kat Oda No 312, Maslak, 34469, Istanbul
+90 212 285 3148
arc_info@itu.edu.tr
show on a map